1.6. sycuricon( 六 ): 流片¶
我们在 rocket-chip 的 regvault 扩展的基础上进行整改,然后将该设计用于芯片流片。
1.6.1. 流片起因:浙大求是安全芯 ZJV¶
浙大求是安全芯是浙江大学计算机科学与技术学院/网络空间安全学院申文博老师、常瑞老师的芯片项目,旨在扩展芯片安全架构,实现新型的芯片安全机制,同时提供真实的芯片实验平台。
求是安全芯 I 号实现了 rocket-chip 的 regvault 扩展,我们小组负责处理器内核的前端设计,由一生一芯团队提供处理器外围和后端版图,最后交给代工厂流片。
1.6.2. 前端代码调整和实现¶
为了让我们 rocket-chip 的核内实现和一生一芯团队提供的芯片外围可以对接起来,我们需要对 rocket-chip 做一些调整,我们在 regvault 的基础上新建了 no-io 分支来实现这部分内容。
1.6.2.1. 删除处理器外围¶
因为我们的处理器使用一生一芯的外围,所以我们需要首先删除 VC707Shell 提供的外围和其他的外设支持。我们在 repo/starship/src/main/scala 中新建了 Axi4 文件夹,里面是对应的模块实现,旨在删除外围部件,仅保留一个 memory 接口和一个 MMIO 接口。
修改 AXI4Top.scala 模块:
定义 StarshipAxi4Top 作为顶层模块
定义 StarshipAxi4TopModuleImp 作为顶层模块的实现
将原有的 PeripherySPIKey、PeripheryUARTKey 等配置删除,不生成 SPI、UART 等外设驱动
仅保留 CanHaveMasterAXI4MemPort、CanHaveMasterAXI4MMIOPort、HasPeripheryDebug,保留内存总线接口、MMIO 接口、调试模块接口
class StarshipAxi4Top(implicit p: Parameters) extends StarshipSystem
with CanHaveMasterAXI4MemPort
with CanHaveMasterAXI4MMIOPort
with HasPeripheryDebug
{
val chosen = new DeviceSnippet {
def describe() = Description("chosen", Map(
"bootargs" -> Seq(ResourceString("nokaslr"))
))
}
override lazy val module = new StarshipAxi4TopModuleImp(this)
}
class StarshipAxi4TopModuleImp[+L <: StarshipAxi4Top](_outer: L) extends StarshipSystemModuleImp(_outer)
with DontTouch
1.6.2.2. 删除处理器插桩¶
因为我们之前的处理器用于模糊测试,所以需要在处理器生成的过程中进行插桩,因此我们在 repo/starship/src/main/scala/utils/StarshipStage.scala 中定义了插桩的过程。
我们将 override 的 run 函数进行修改,将里面的 RunFirrtlTransformAnnotation(Dependency[CoverageInstrument]) 注释掉,这样生成的 verilog 就没有对应的 coverage_sum 的插桩了。
val starshipAnnotation =
if (topName.isDefined && thName.isEmpty) {
logger.info(s"Generate Top ${thName} ${topName}")
Seq(
RunFirrtlTransformAnnotation(Dependency[ExtractTop]),
BlackBoxResourceFileNameAnno(incOutFile.get),
RunFirrtlTransformAnnotation(Dependency[RegisterRecord])
// RunFirrtlTransformAnnotation(Dependency[CoverageInstrument])
)
1.6.2.3. 修改 MMIO 范围¶
一生一芯提供的外围的 MMIO 地址范围在 0x1000000-0x80000000,所以我们需要将 MMIO 的地址范围做对应的修改,不然到时候核内寻址不会将地址读写请求从 MMIO 口中发送出来。
这里对 Config.scala 进行修改,可以看到 BaseConfig 对 ExtBus 参数进行了修改,将 base 设置为 0x1000_0000,将 size 设置为 0x7000_0000。
class StarshipBaseConfig extends Config(
// new WithRoccExample ++
new WithExtMemSize(0x80000000L) ++
new WithNExtTopInterrupts(0) ++
new WithDTS("zjv,starship", Nil) ++
new WithEdgeDataBits(64) ++
new WithCoherentBusTopology ++
new WithoutTLMonitors ++
new WithPECRocc ++
new BaseConfig().alter((site,here,up) => {
case BootROMLocated(x) => up(BootROMLocated(x), site).map { p =>
// invoke makefile for zero stage boot
val freqMHz = site(FPGAFrequencyKey).toInt * 1000000
val path = System.getProperty("user.dir")
val make = s"make -C firmware/zsbl ROOT_DIR=${path} img"
println("[Leaving rocketchip] " + make)
require (make.! == 0, "Failed to build bootrom")
println("[rocketchip Continue]")
p.copy(hang = 0x10000, contentFileName = s"build/firmware/zsbl/bootrom.img")
}
case ExtBus => Some(MasterPortParams(
base = x"1000_0000",
size = x"7000_0000",
beatBytes = site(MemoryBusKey).beatBytes,
idBits = 4))
})
)
这样我们就完成了对 MMIO 范围的修改,此时我们生成最后的 verilog,可以检查对应的设备树,可以看到:
L12: mmio-port-axi4@10000000 {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges = <0x10000000 0x10000000 0x70000000>;
};
1.6.2.4. 启动过程调整¶
在一生一芯提供的启动过程中,我们的处理器从 0x30000000 开始启动,然后开始访问对应地址范围的 flash。该 flash 前半部分是一段启动代码,后半部分是系统程序镜像,处理器执行前半部分的启动代码将程序镜像 copy 到内存中,然后开始后续的系统启动。
所以我们让处理器在 zsbl 当中执行 0x30000000 的跳转。所以对 firmware 的 zsbl 代码进行调整,修改为
#define ROM_BASE 0x30000000
.section .text.start, "ax", @progbits
.globl _start
_start:
csrwi 0x7c1, 0 // disable chicken bits
li s0, ROM_BASE
csrr a0, mhartid
li a1, 0
jr s0
这一看到这个时候 maskrom 已经没有用了,所以我们可以把 maskrom 删除掉。修改 Top.scala 的 StarshipSystem,删除 maskrom 的实例化:
class StarshipSystem(implicit p: Parameters) extends RocketSubsystem
with HasAsyncExtInterrupts
{
val bootROM = p(BootROMLocated(location)).map { BootROM.attach(_, this, CBUS) }
override lazy val module = new StarshipSystemModuleImp(this)
}
在 AXI4Top/Config.scala,在原来 regvault 的 Config 的基础上,删除了 WithPeripherals 配置,这样内部的 TileLink 就不会生成 maskrom 对应的路由。
// class WithPeripherals extends Config((site, here, up) => {
// case MaskROMLocated(x) => List(
// MaskROMParams(BigInt(0x20000L), "StarshipROM")
// )
// })
class StarshipAxi4DebugConfig extends Config(
// new WithPeripherals ++
new WithJtagDTM ++
new WithClockGateModel() ++
new StarshipBaseConfig().alter((site,here,up) => {
case PeripheryBusKey => up(PeripheryBusKey, site).copy(dtsFrequency = Some(site(FrequencyKey).toInt * 1000000))
/* timebase-frequency = 1 MHz */
case DTSTimebase => BigInt(1000000L)
})
)
1.6.2.5. Verilog 代码生成¶
修改 conf/build.mk 的配置为对应的:
# Verilog Generation Configuration
##################################
STARSHIP_CORE ?= Rocket
STARSHIP_FREQ ?= 100
STARSHIP_TH ?= starship.axi4.TestHarness
STARSHIP_TOP ?= starship.axi4.StarshipAxi4Top
STARSHIP_CONFIG ?= starship.axi4.StarshipAxi4DebugConfig
然后执行 make vlt 就可以得到需要的代码,我们将必要的代码取出即可:
plusarg_reader.v
Rocket.StarshipAxi4Top.StarshipAxi4DebugConfig.top.v
1.6.2.6. IP 核的替换¶
我们 Top 内部的 cache 是用 array 实现的,但是当我们将代码综合为后端版图的时候,这些 array 只能被综合成一些离散的寄存器。但实际上为了节约芯片面积,我们希望用 sram IP 核来替换这些 array 模块,这样我们综合的版图就可以用 SRAM 实现 cache。
需要替换的主要就是 icache、dcache 的 data array 和 tage array,他们的尺寸可以用 512x64、64x84、64x88 的 sram ip 拼接而成。
我们用 sram 自动化工具生成对应的 sram 文件,这些工业级的 ip 核输入输出引脚一般如下:
CE:芯片使能信号,只有当 CE=0 的时候才可以执行读写操作
WE:芯片写使能信号,只有当 WE=0 的时候才可以执行写操作
A:地址信号线
D:数据信号线
BWE:芯片位写使能信号线,只有当对应位的 BWE=0 的时候才可以对这个位执行写操作
Q:芯片数据输出
时序:芯片的读写操作都需要等待一个周期完成
然后我们对 Top 中的 array 进行替换,实际上只需要对自动化生成的 array 模块做替换即可,但是因为经验不足对 top 的源代码做了替换,到之后后续每次重新生成 top 都要替换一次代码。
注意:
rocket 中的使能信号都是高电平使能,这里需要手动修改为低电平使能
rocket 的段使能都是多位的,而 sram 的段使能是单位的,需要做一个转换
1.6.2.7. 接入一生一芯外围¶
这部分由一生一芯团队提供测试仿真的外围环境,因为他们的外围只有一个面向处理器的 AXI 口,因此需要额外生成一个 NIC 桥将我们处理器的两个口转换为一个口,然后和外围连接。
这部分代码因为是合作方技术产权,所以不予开源。
1.6.2.8. 增加 debug module 支持¶
我们将 Testharness 当中 Top 外围的 debug module 的连接模块从源文件中剥离出来,然后让 Top 进行连接,这部分的电路图我们在 debug module 一文中已经绘制过了,现在将 debug module 相关的代码附加如下,需要的朋友可以自己 copy:
module core_wrapper (
input logic clock,
input logic reset,
input logic io_debug_reset,
input logic io_jtag_TCK,
input logic io_jtag_TMS,
input logic io_jtag_TDI,
output logic io_jtag_TDO,
...
);
logic top_clock;
logic top_reset;
logic top_resetctrl_hartIsInReset_0;
logic debug_clock;
logic debug_reset;
logic debug_systemjtag_reset;
logic debug_ndreset;
logic debug_dmactive;
logic debug_dmactiveAck;
TopJTAGLInk u_TopJTAGLInk (
.clock (clock),
.io_reset (reset),
.io_debug_reset (io_debug_reset),
.top_clock (top_clock),
.top_reset (top_reset),
.top_resetctrl_hartIsInReset_0(top_resetctrl_hartIsInReset_0),
.debug_clock (debug_clock),
.debug_reset (debug_reset),
.debug_systemjtag_reset (debug_systemjtag_reset),
.debug_ndreset (debug_ndreset),
.debug_dmactive (debug_dmactive),
.debug_dmactiveAck (debug_dmactiveAck)
);
assign io_mst_mmio_araddr[31] = '0;
assign io_mst_mmio_awaddr[31] = '0;
StarshipAxi4Top u_StarshipAxi4Top (
.clock (top_clock),
.reset (top_reset),
.resetctrl_hartIsInReset_0 (top_resetctrl_hartIsInReset_0),
.debug_clock (debug_clock),
.debug_reset (debug_reset),
.debug_systemjtag_jtag_TCK (io_jtag_TCK),
.debug_systemjtag_jtag_TMS (io_jtag_TMS),
.debug_systemjtag_jtag_TDI (io_jtag_TDI),
.debug_systemjtag_jtag_TDO_data (io_jtag_TDO),
.debug_systemjtag_jtag_TDO_driven(),
.debug_systemjtag_reset (debug_systemjtag_reset),
.debug_systemjtag_mfr_id ('0),
.debug_systemjtag_part_number ('0),
.debug_systemjtag_version ('0),
.debug_ndreset (debug_ndreset),
.debug_dmactive (debug_dmactive),
.debug_dmactiveAck (debug_dmactiveAck),
...
);
endmodule
module TopJTAGLInk (
input logic clock,
input logic io_reset,
input logic io_debug_reset,
output logic top_clock,
output logic top_reset,
output logic top_resetctrl_hartIsInReset_0,
output logic debug_clock,
output logic debug_reset,
output logic debug_systemjtag_reset,
input logic debug_ndreset,
input logic debug_dmactive,
output logic debug_dmactiveAck
);
assign top_clock = clock;
logic sync_debug_ndreset;
AsyncResetRegVec_w1_i0_tb debug_ndreset_sync (
.clock(clock),
.reset(io_reset),
.io_d (debug_ndreset),
.io_q (sync_debug_ndreset)
);
assign top_reset = io_reset | sync_debug_ndreset;
assign top_resetctrl_hartIsInReset_0 = top_reset;
assign debug_systemjtag_reset = io_debug_reset;
logic sync_io_debug_reset;
AsyncResetSynchronizerShiftReg_w1_d3_i0_tb io_debug_reset_shift_sync (
.clock(clock),
.reset(io_debug_reset),
.io_q (sync_io_debug_reset)
);
assign debug_reset = ~sync_io_debug_reset;
ResetSynchronizerShiftReg_w1_d3_i0_tb dmactiveAck_sync (
.clock(clock),
.reset(debug_reset),
.io_d (debug_dmactive),
.io_q (debug_dmactiveAck)
);
logic clock_en;
always @(posedge clock or posedge debug_reset) begin
if (debug_reset) begin
clock_en <= 1'h1;
end else begin
clock_en <= debug_dmactiveAck;
end
end
EICG_wrapper gated_clock_debug_clock_gate (
.in (clock),
.test_en(1'b0),
.en (clock_en),
.out (debug_clock)
);
endmodule
module EICG_wrapper (
output out,
input en,
input test_en,
input in
);
reg en_latched /*verilator clock_enable*/;
always @(*) begin
if (!in) begin
en_latched = en || test_en;
end
end
assign out = en_latched && in;
endmodule
module AsyncResetRegVec_w1_i0_tb (
input clock,
input reset,
input io_d, // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 59:14]
output io_q // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 59:14]
);
reg reg_; // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 61:50]
assign io_q = reg_; // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 65:8]
always @(posedge clock or posedge reset) begin
if (reset) begin // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 62:16]
reg_ <= 1'h0; // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 63:9]
end else begin
reg_ <= io_d; // @[repo/rocket-chip/src/main/scala/util/AsyncResetReg.scala 61:50]
end
end
endmodule
module AsyncResetSynchronizerShiftReg_w1_d3_i0_tb (
input clock,
input reset,
output io_q // @[repo/rocket-chip/src/main/scala/util/ShiftReg.scala 36:14]
);
wire output_chain_clock;
wire output_chain_reset;
wire output_chain_io_d;
wire output_chain_io_q;
AsyncResetSynchronizerPrimitiveShiftReg_d3_i0_tb output_chain (
.clock(output_chain_clock),
.reset(output_chain_reset),
.io_d (output_chain_io_d),
.io_q (output_chain_io_q)
);
assign io_q = output_chain_io_q;
assign output_chain_clock = clock;
assign output_chain_reset = reset;
assign output_chain_io_d = 1'h1;
endmodule
module AsyncResetSynchronizerPrimitiveShiftReg_d3_i0_tb (
input clock,
input reset,
input io_d,
output io_q
);
reg sync_0; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
reg sync_1; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
reg sync_2; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
assign io_q = sync_0; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 59:8]
always @(posedge clock or posedge reset) begin
if (reset) begin // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
sync_0 <= 1'h0; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
end else begin
sync_0 <= sync_1; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 57:10]
end
end
always @(posedge clock or posedge reset) begin
if (reset) begin // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
sync_1 <= 1'h0; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 51:87]
end else begin
sync_1 <= sync_2; // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 57:10]
end
end
always @(posedge clock or posedge reset) begin
if (reset) begin // @[repo/rocket-chip/src/main/scala/util/SynchronizerReg.scala 54:22]
sync_2 <= 1'h0;
end else begin
sync_2 <= io_d;
end
end
endmodule
module ResetSynchronizerShiftReg_w1_d3_i0_tb (
input clock,
input reset,
input io_d,
output io_q
);
wire output_chain_clock;
wire output_chain_reset;
wire output_chain_io_d;
wire output_chain_io_q;
AsyncResetSynchronizerPrimitiveShiftReg_d3_i0_tb output_chain (
.clock(output_chain_clock),
.reset(output_chain_reset),
.io_d (output_chain_io_d),
.io_q (output_chain_io_q)
);
assign io_q = output_chain_io_q;
assign output_chain_clock = clock;
assign output_chain_reset = reset;
assign output_chain_io_d = io_d;
endmodule
至此代码核内的代码部分已经实现完毕了。
1.6.3. 处理器测试¶
因为这部分代码不开源,所以我只能提供一个简单的思路。
1.6.3.1. 功能测试¶
首先我们执行了一生一芯提供的三个测试:
print hello world:测试外围的串口正确,测试 flash 读写正确
memory copy:测试内存读写正确
thread switch:测试时钟中断正确
全都执行通过后进行功能测试,我们将 starship 的 regvault 分支的 function test 移植过来,将起始地址设置为 0x30000000,然后开始测试。因为不支持差分测试,对于结果只能根据调试信息人工比对。测试通过说明我们新增的 regvault 扩展没有问题。
1.6.3.2. JTAG 测试¶
之后执行 jtag 的测试,我们在仿真环境中加入 SimJTAG 模块,将 Top 的 JTAG 信号连接到 SimJTAG,然后用 riscv-spike-sdk 的 openocd、sdk 进行连接和调试,对 debug 的断点、单步、内存读写、寄存器读写进行测试。
设置断点其实是在存储器中写入 ebreak 指令,然后在执行的时候触发异常,然后陷入 debug rom 等待后续指令,因此我们不能再 flash 打断点(flash 不可写),因此我们只能在 memory 打断点。我们首先编写一个在将 flash 程序拷贝到内存,然后在内存执行程序的程序,然后执行如下操作流程:
设置内存写监视器,watch 0x80000080
执行程序,当写了 0x80000080 的时候会断住
这个时候 0x80000000 的指令已经写好了,打 0x80000000 的断点
执行 continue,等再次断住,这个时候程序已经被拷贝到内存,然后可以开始正常的调试
不过实际上我们也可以直接 hook 模拟的 memory,让他直接载入程序对应的 hex 文件,略过拷贝的过程,节约仿真测试的时间。
这个方法可以在外部存储拷贝到内存的启动阶段的时候设置断点,当我们需要对一个芯片启动阶段进行调试的时候,就可以这样操作。
不过因为我们下板子之后,内存拷贝比较慢,当我们启动 debug module 连接让 hart 陷入 debug rom 的时候做了一半的外部存储的拷贝,这个时候 0x80000000 已经拷贝完毕,可以直接打断点。
如果芯片的内存拷贝非常快,导致还没 openocd 连接,已经拷贝完毕开始执行后续程序了,这个时候我们可以在被拷贝的程序开头加入一个死循环,这样程序拷贝完毕之后会死循环,在 openocd 连接之后执行 set PC 等指令跳出死循环就可以执行后续操作。
可能是因为仿真过于慢的问题,在执行 debug 的时候会出现 package error,然后执行一些指令会遇到 Invalid remote reply: b0a2b600,多次执行才可以解决。但是暂时无法定位问题发生的原因。
1.6.3.3. 指令测试¶
用 riscv-tests 生成所有指令的测试程序,然后让处理器依次执行,看是不是可以测试成功。
步骤如下:
修改 env 的 macro,让程序的执行地址和处理器保持一致
hook 处理器模拟的 memory,让处理器可以直接将程序载入内存,节约从 flash 拷贝的时间
因为没有 to_host 的检查,在 write_host 之后加入一条 read_host,然后对硬件做 hook,检查读 host 地址的时候对应的值是不是 1(替换原来的 host 写入 1 结束的 pass 条件)
编写 Python 脚本让处理器自动化的执行各个测试
这三部分测试和仿真环境因为涉及一生一芯的仿真环境,所以保持闭源。
1.6.3.4. 内核启动测试¶
对接团队仿真启动了 rtthread, 但是没有执行 linux 内核,理论上应该让处理器执行完整的内核。
但是我们需要针对一生一芯外围的设备树进行 linux 内核的移植和裁减,考虑到开发的时间成本,以及仿真启动 linux 内核需要一周多的时间,所以最后没有实现内核镜像的启动,这部分等后续有机会弥补。
1.6.4. 从流片到回片¶
在我们完成前端 RTL 的功能测试之后,对接团队就进行了后续的进一步流程:
继续功能测试,验证可以执行 rtthread 系统
进行时序调优,最后将始终频率设置在大概 700 MHz,时序瓶颈主要在处理器和外部设备的总线上
后端生成 GDS 版图交给流片的厂商进行生产
流片回片,对芯片进行后续测试和修复
设计芯片 logo,可以找工图的同学用 CAD 软件绘制
芯片交给封装的厂商封装
制作 PCB 电路板,将芯片、flash、fpga、ddr 等组建组装在一起,得到最后的实验平台
production |
description |
|---|---|
|
GDS from backend design |
logo describled by CAD format |
|

|
chip after sealed |
|
pcb of platform |
1.6.5. 平台使用¶
现在我们对平台的使用进行介绍,包括镜像的制作、镜像的烧写、平台的使用等。
1.6.5.1. 镜像的制作¶
镜像的制作使用 ysyx 提供的编译环境,我们自己根据需要做了适配,位于仓库 https://github.com/zhouyangye1076/regvault-flash.git 当中,仓库组成如下:
.
├── prog
│ ├── bin
│ │ └── mem # 用于烧写的二进制镜像
│ └── src # 编译景象的源代码
│ ├── archinfo # 架构相关代码
│ ├── asmtest
│ ├── loader # 用于将系统从 flash 拷贝到 memory 的代码
│ ├── rtthread.tar.gz # rtthread 的源代码压缩包
│ ├── run.py # 编译文件
│ └── ysyx_hello # hello 程序源代码
└── utils
├── abstract-machine
│ ├── am # 平台相关的代码和头文件
│ ├── klib # 一些基本库函数代码,比如 stdio、stdlib 等
│ ├── LICENSE
│ ├── Makefile
│ ├── README
│ └── scripts # 各类 makefile 脚本
└── setup.sh # 设置环境变量
编译步骤如下:
执行
cd utils; source setup.sh,将 abstract-machine 等文件路径加入环境变量将 prog/src/run.py 的 APP_NAME 参数修改为 ysyx_hello
然后执行
cd prog/src; python run.py编译 prog/src/ysyx_hello 下的代码得到 flash 镜像编译 ysyx_hello 的 hello 源代码,得到对应的二进制程序于
prog/src/ysyx_hello/build/ysyx_hello-riscv64-mycpu.bin,该程序将被载入 memory 从 0x80000000 地址开始被执行编译 loader 的源代码,该代码将 ysyx_hello 作为 payload,从 0x30000000 开始执行,将 payload hello 载入到内存,结果保存在
prog/src/loader/build/ysyx_hello-mem.bin最后的二进制被拷贝到
prog/bin/mem/ysyx_hello-mem.bin
解压
prog/src/rtthread.tar.gz得到prog/src/rtthread将 prog/src/run.py 的 APP_NAME 参数修改为 rtthread
执行
cd prog/src; python run.py编译 prog/src/rtthread 下的代码得到 flash 镜像,最后的代码保存在prog/bin/mem/rtthread-mem.bin
prog/bin/mem/ysyx_hello-mem.bin 和 prog/bin/mem/rtthread-mem.bin 已经提前编译就绪,可以直接使用
1.6.5.2. 镜像的烧写¶
现在我们需要将上节编译的程序烧写到 flash,供平台执行。下图为所需要的烧写工具:
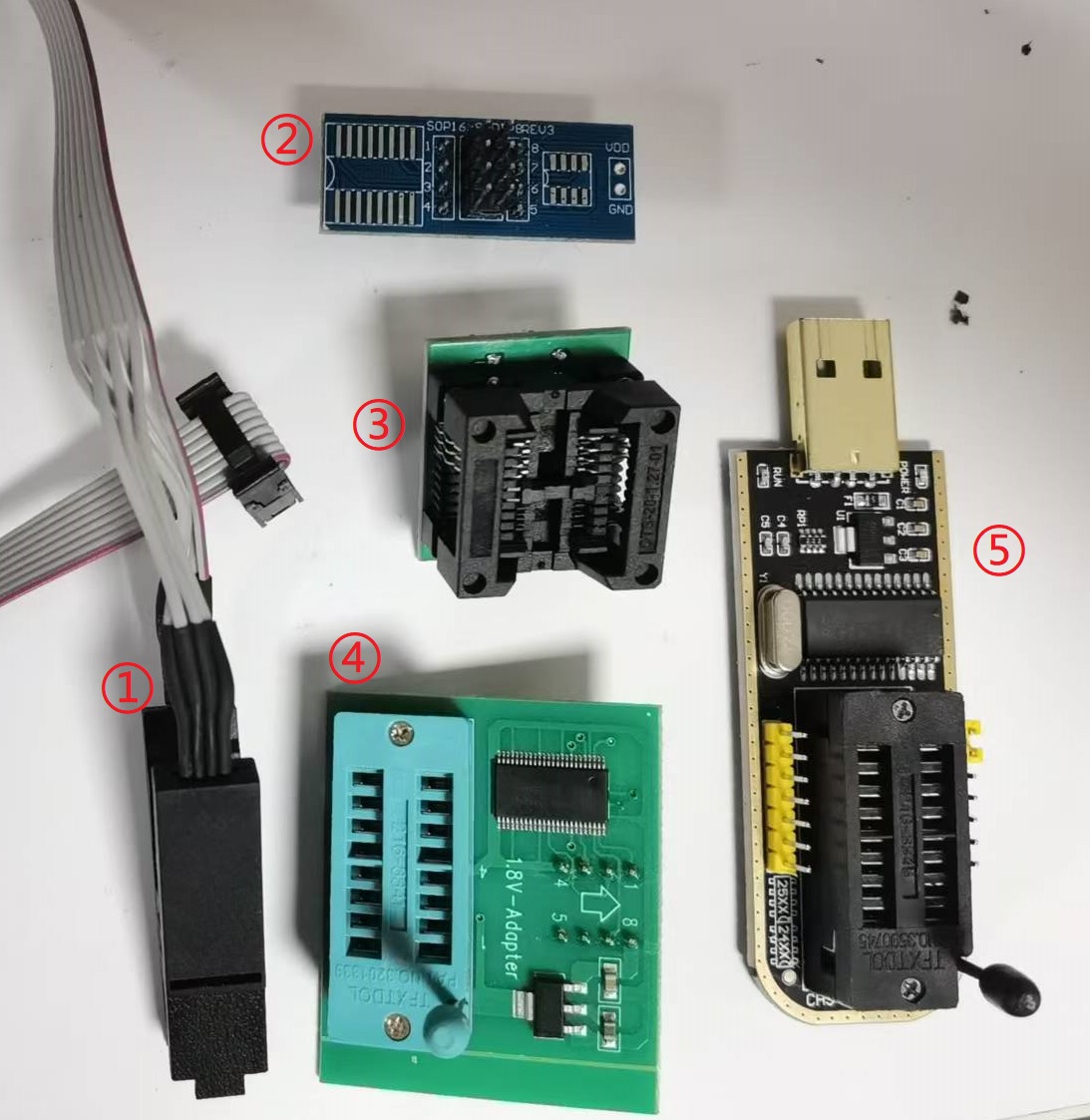
烧写夹子:用于夹住 flash 芯片的 8 个输入输出引脚,然后进行读写操作。对于焊接在电路板上的 flash 芯片,很多时候只能用夹子夹住裸露的引脚进行烧写。夹子的 8 根线中有一根的塑料层是红色的,对应的就是 flash 芯片的 1 号引脚。
SOP16/8-DIP8REV3:蓝色小板子,可以配合烧写夹子使用,烧写夹子下端的孔插在蓝色板子的引脚中,进而接到其他的烧写工具上。此外,蓝色板子左侧有 16 个锡片,右侧有 8 个锡片,可以将 16 脚或者 8 脚的芯片引脚用锡焊接在锡片上,然后进行输入输出
SOP8 200mil 底座:可以将 8 引脚的 flash 芯片卡在基座的卡槽中进行烧写,比烧写夹子和 SOP16/8-DIP8REV3 方便很多,还不容易损坏 flash 芯片。
1.8V 转换器:可以将 3.3V/5.0V 的烧写电压转换为 1.8V,适用于 1.8V 的芯片烧写
CH341A 编程器:上述主要都是信号传递设备,CH341A 是信号处理设备,使用 CH341A 端口协议进行数据传输,前 8 个引脚支持对 SPI 协议数据传输,后 8 个引脚支持对 I2C 协议数据传输。
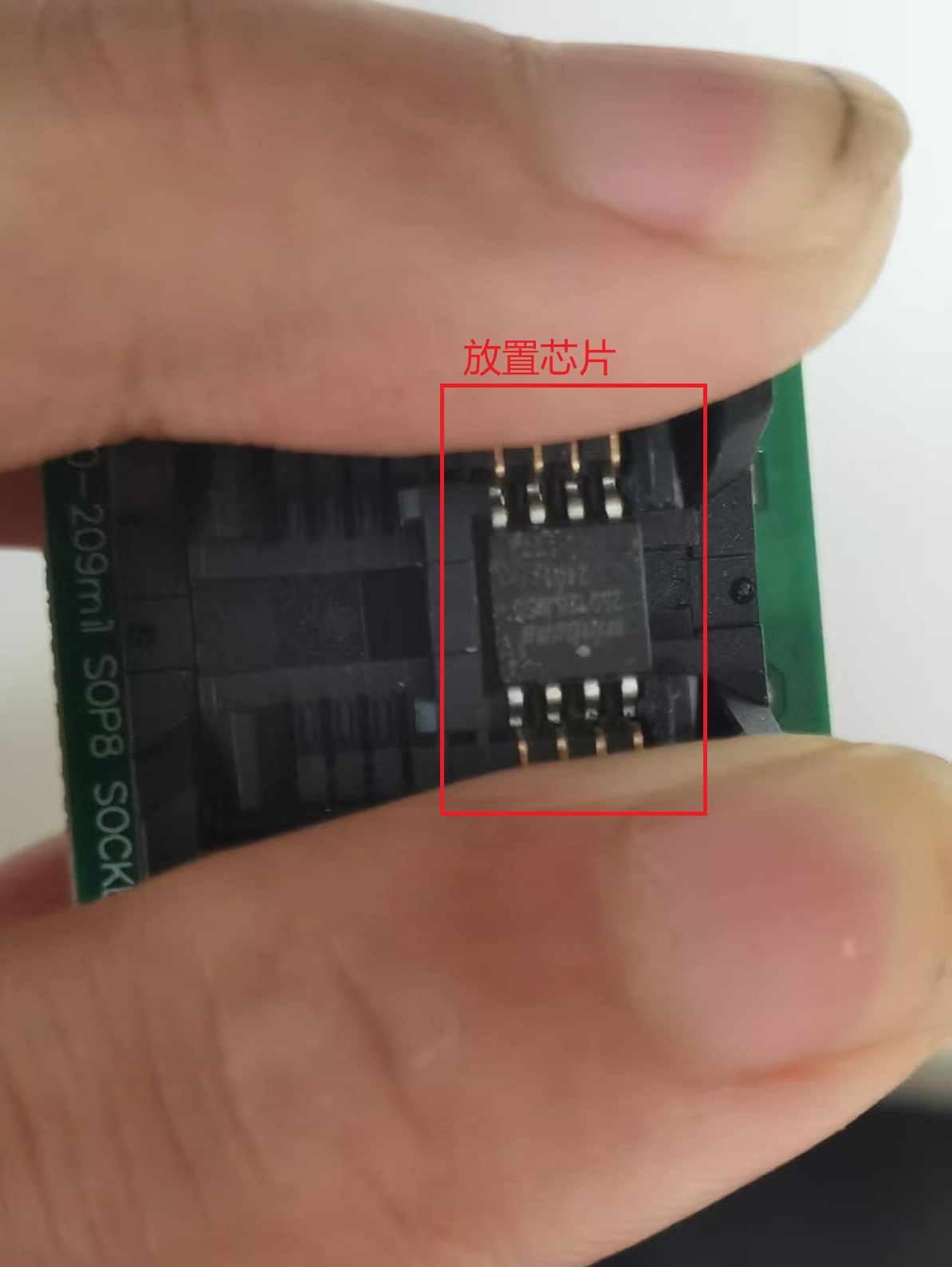
本次实验烧写的对象是 W25Q128JWSIQ flash 芯片。该芯片使用 SPI 传输协议、8 引脚、1.8V 电压、16MB 存储容量、芯片可以拆卸。在芯片的一角有一个小圆点(光线太暗是看不清的,需要强光照射),对应的就是 SPI-FLASH 芯片的 1 号引脚的位置。 因此我们可以使用烧写基座、1.8V 电压转换器、CH341A 编程器进行烧写,无须适用烧写夹子和蓝色板子。现在我们介绍如何将这些部件连接起来,对 flash 进行烧写。

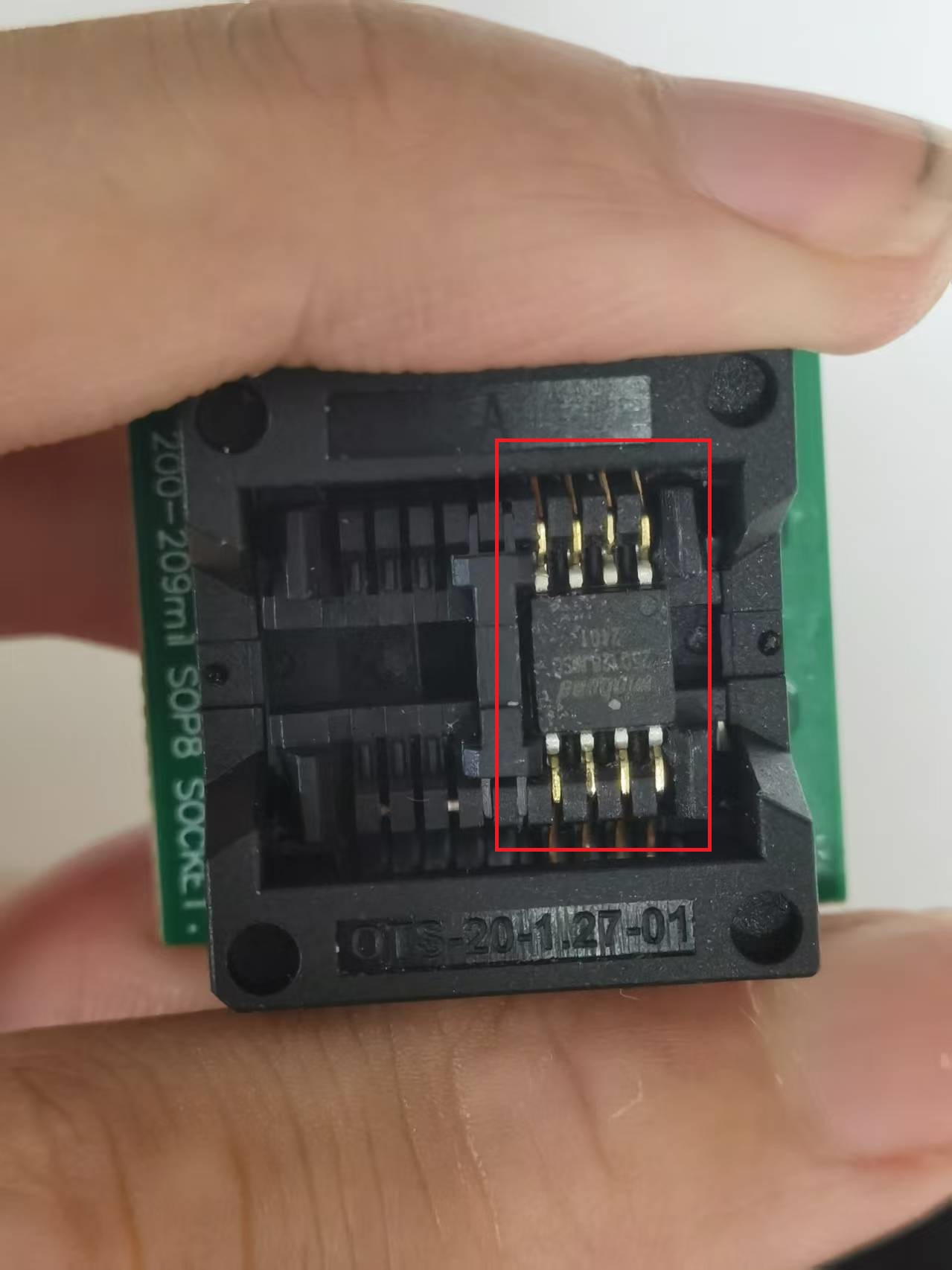
首先按压基座的上层,下压弹簧,内部的弹簧会让中间凹槽两侧的铜片引脚打开,留出放置 flash 芯片的位置。需要注意的是,基座一共有 16 个可以卡住 flash 芯片的槽,但是只有 8 个有铜片是可以使用的;当我们下压上层塑料的时候,如果只是将没有铜片一侧的塑料压到底,因为塑料有一定的弹性,有铜片一侧的塑料也许没有完全压倒底,这会导致铜片引脚没有完全打开,flash 芯片会放不下去。
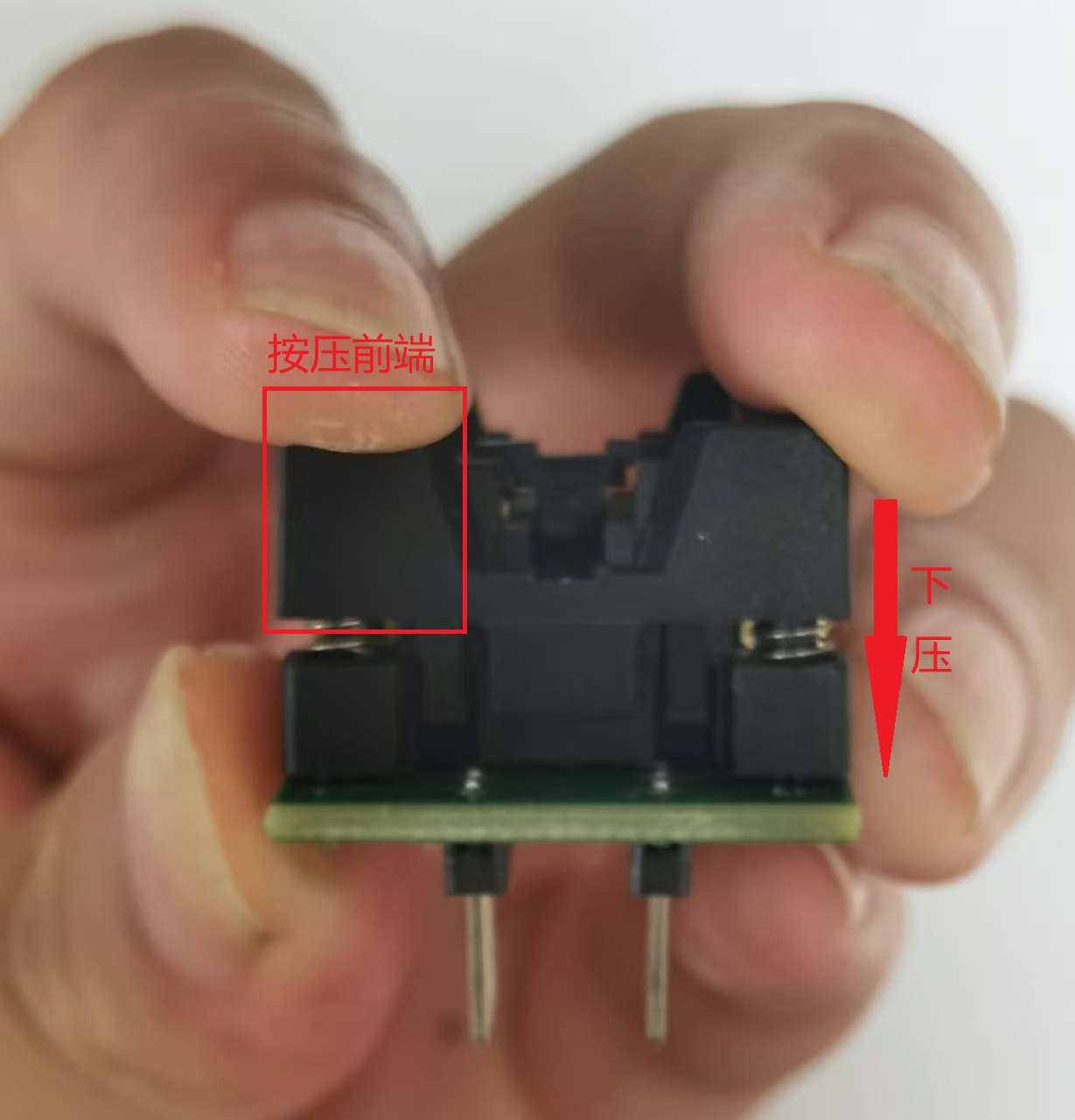
然后将 SPI-FLASH 芯片放到基座对应的凹槽中。如果塑料被压到底,铜片被完全打开,这个凹槽是可以刚好将芯片放入,没有任何阻碍的;如果发生了阻碍请检查是不是弹簧没有压到底,或者部件存在轻微变形。如果芯片存在卡住的情况,请不要用力掰扯,会导致 flash 引脚被拗断(本人拗断了 2 块的引脚);另外芯片只有半个指甲盖那么大,所以请使用镊子方便芯片的拾取和放置。
之后将手指放开,弹簧弹起,铜片下压,正好将 SPI-FLASH 的 8 个引脚压在铜片底下。如果要拿出芯片,就将上层塑料下压,然后用镊子夹出即可。
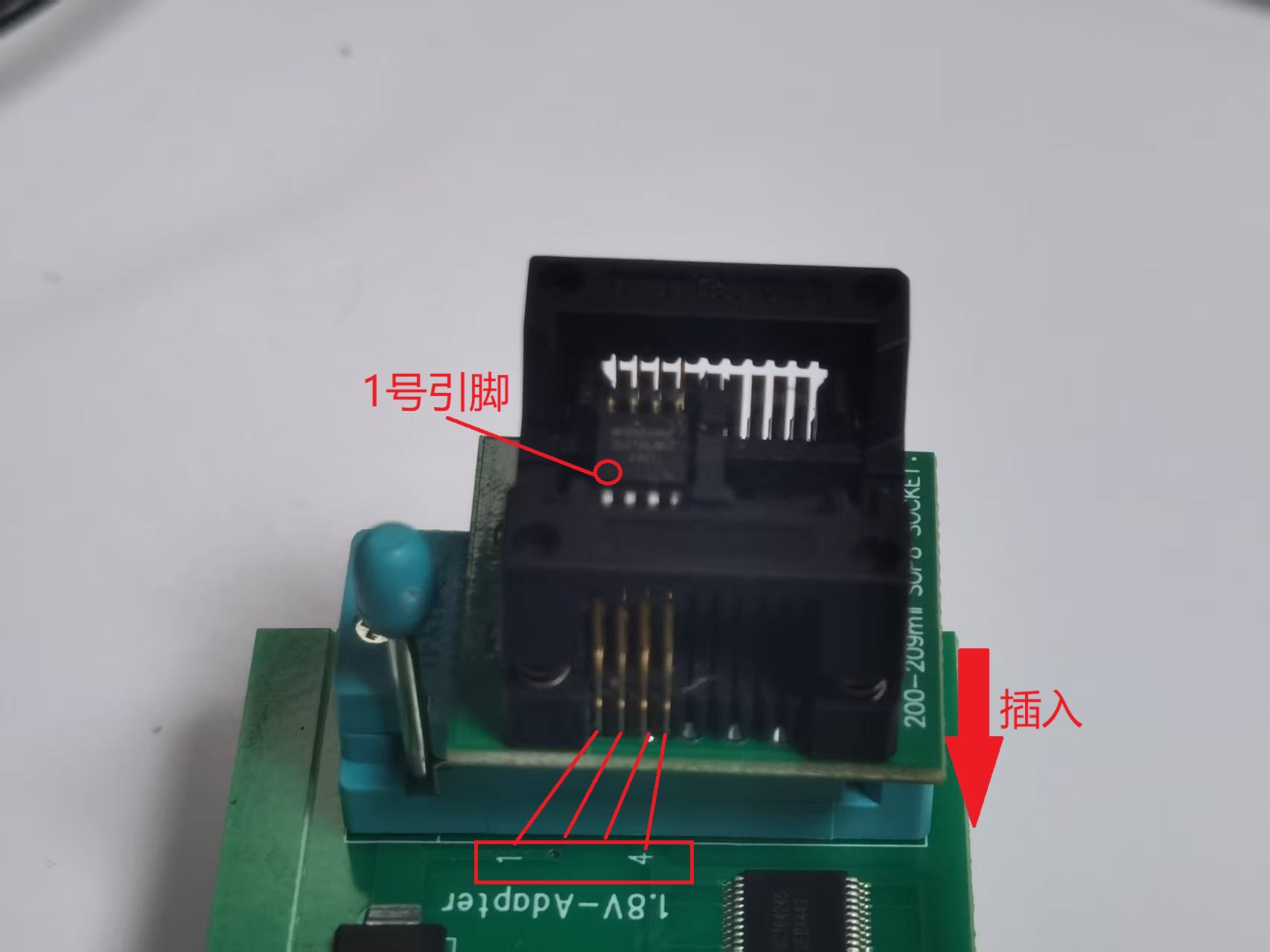
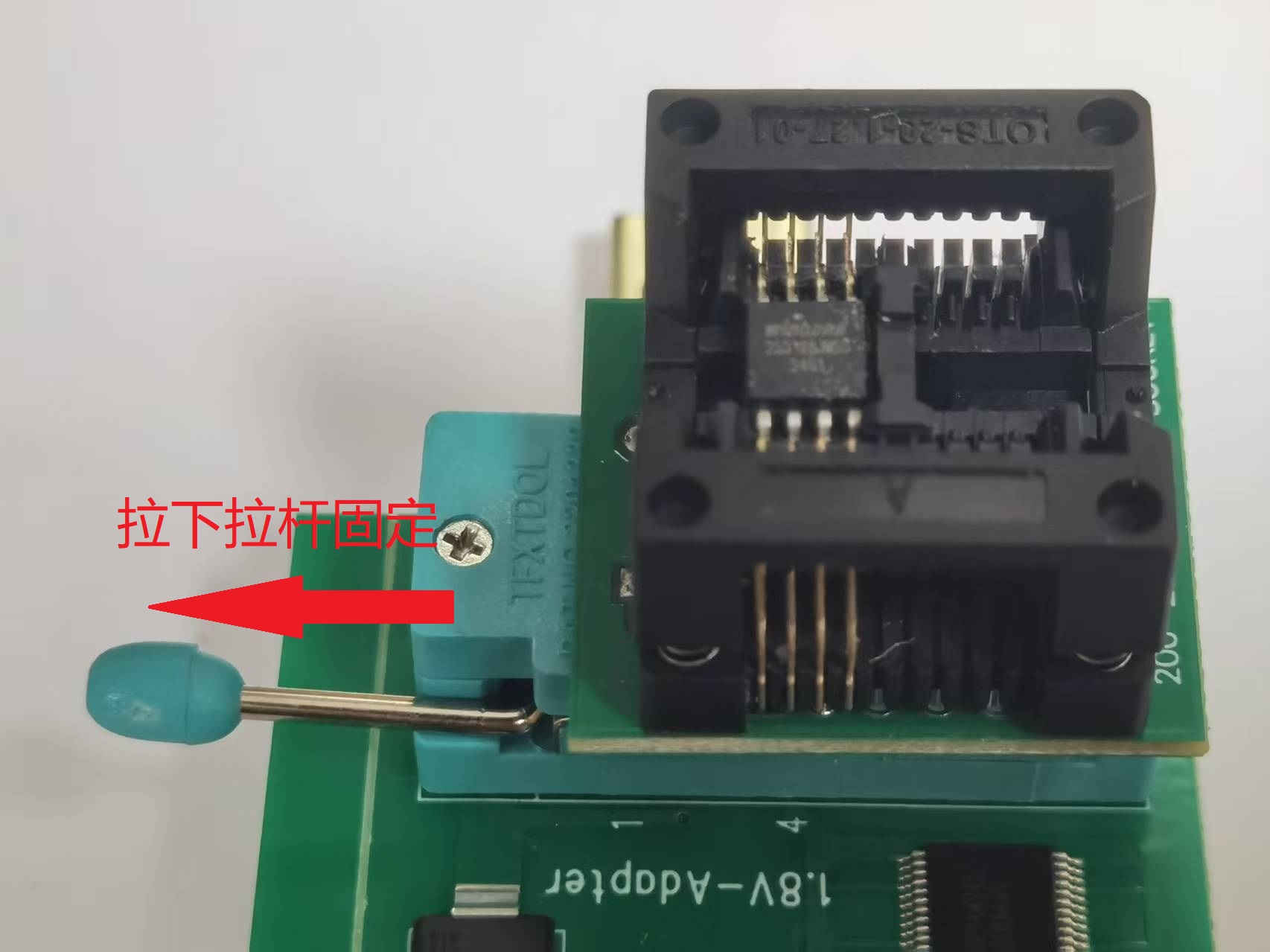
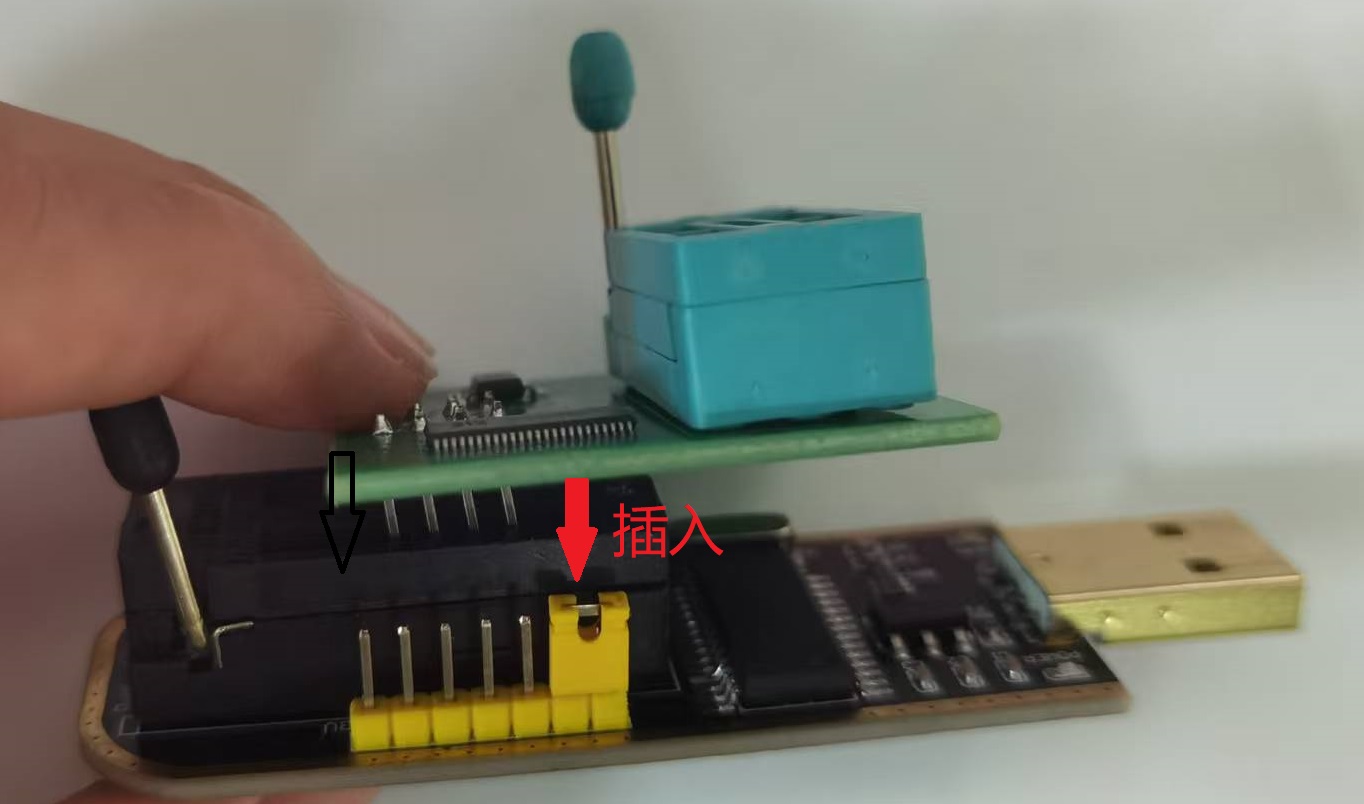
将基座的 8 个引脚插入 1.8V 转换器的卡槽。1.8V 转换器的一侧标注了 1-4 号引脚的位置,请确保 SPI-FLASH 芯片的 1 号引脚位置和 1.8V 转换器相对应。然后拉下拉杆,将基座的 8 根引脚夹紧。
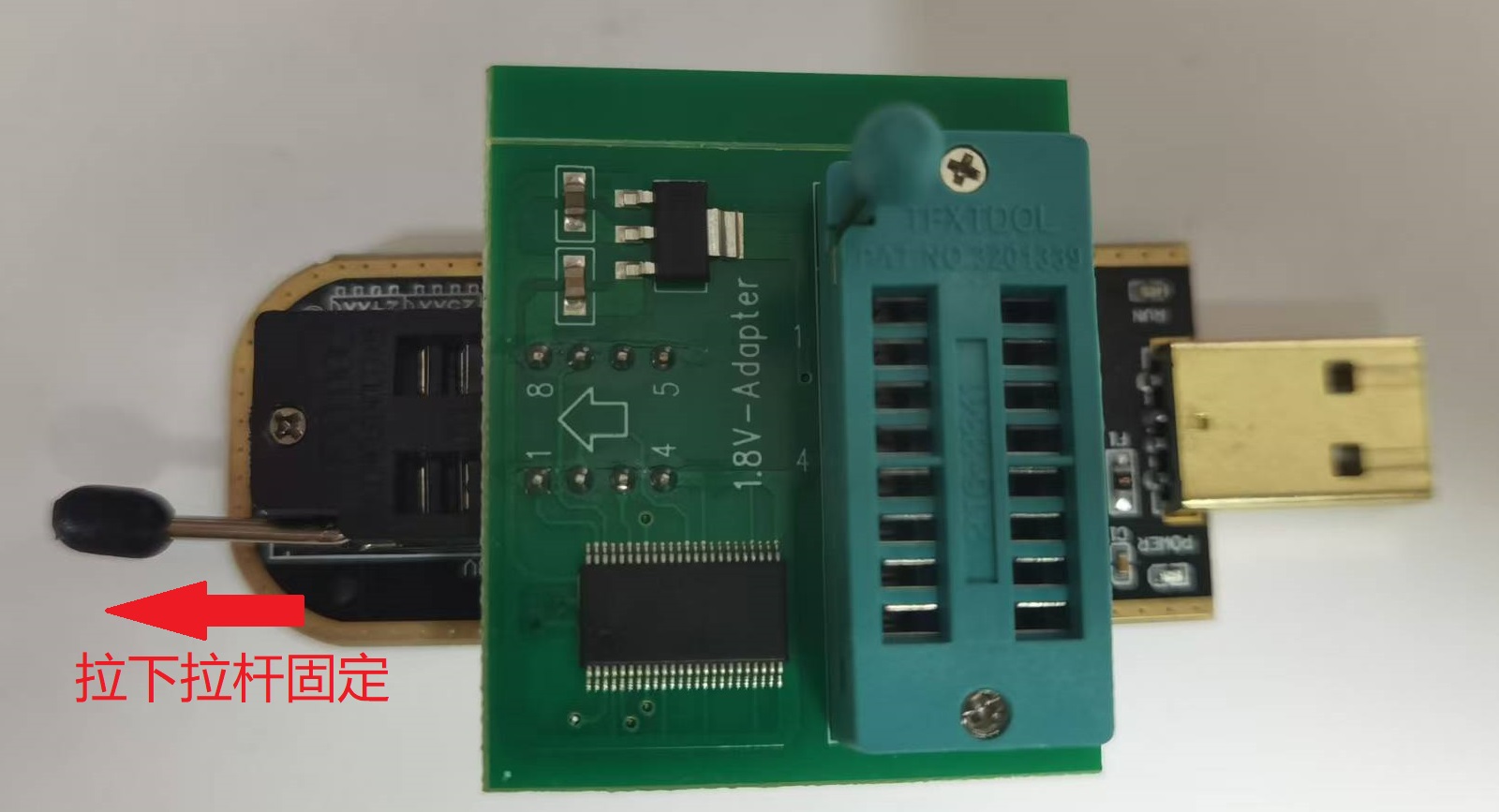
CH341A 编程器拉杆一侧是引脚 1-4 的位置,靠 USB 一侧的凹槽支持 SPI 传输协议,靠拉杆一侧的凹槽支持 I2C 协议,因此我们的 1.8V 转换器应该插在前 8 个凹槽中。插入之后,拉下拉杆即可。
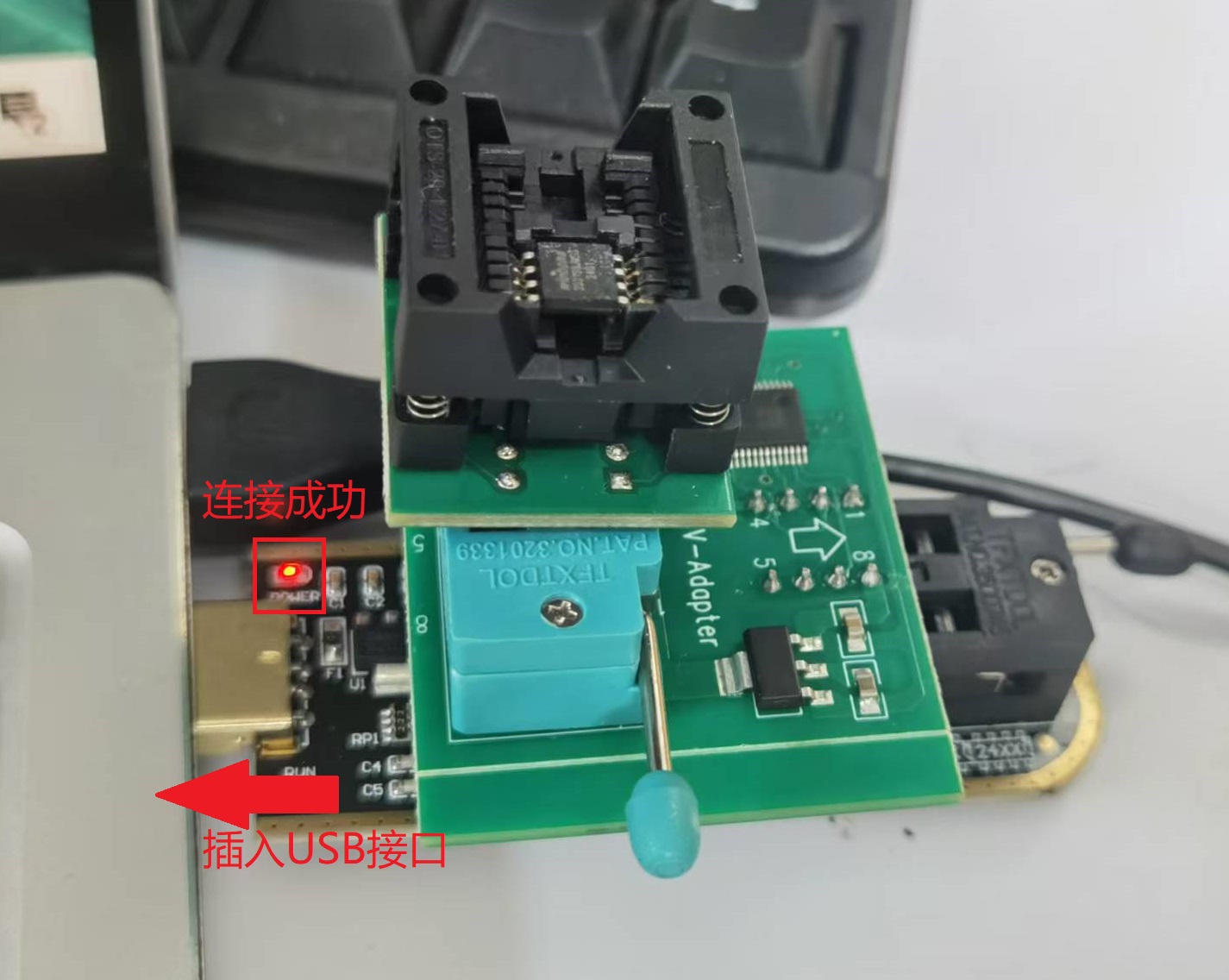
最后将 CH341A 编程器的 USB 口插入电脑进行烧写即可,如果插入小灯会变亮,如果芯片识别成功,小灯亮度会提高一倍。
现在我们进行烧写的驱动配置和软件教学,该方法只适用于 windows 平台。
我们进入 CH341A 驱动的官网
https://www.wch.cn/downloads/CH341SER_EXE.html下载 CH341A 编程器的驱动。

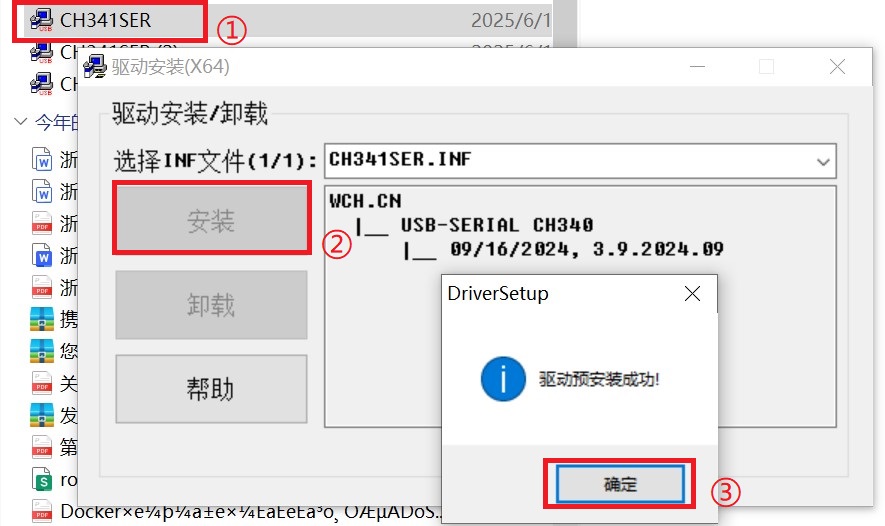
点击驱动安装程序 CH341SER,然后点击“安装”,安装完毕后会显示“驱动预安装成功”。这个时候驱动还没有安装完毕。
之后打开“设备管理器”,可以看到 COM/PLT 下 CH341 的设备无法被识别,这个时候右键选择”更新驱动程序(P)“,然后选择”浏览我的电脑以查找驱动程序(R)“,然后选择”让我从计算机上的可用程序列表中选取(L)“。在列表的最后就可以看到 CH341SER 预安装的驱动,点击选择对应的 CH341A 驱动即可。之后就可以看到设备被识别出来了。
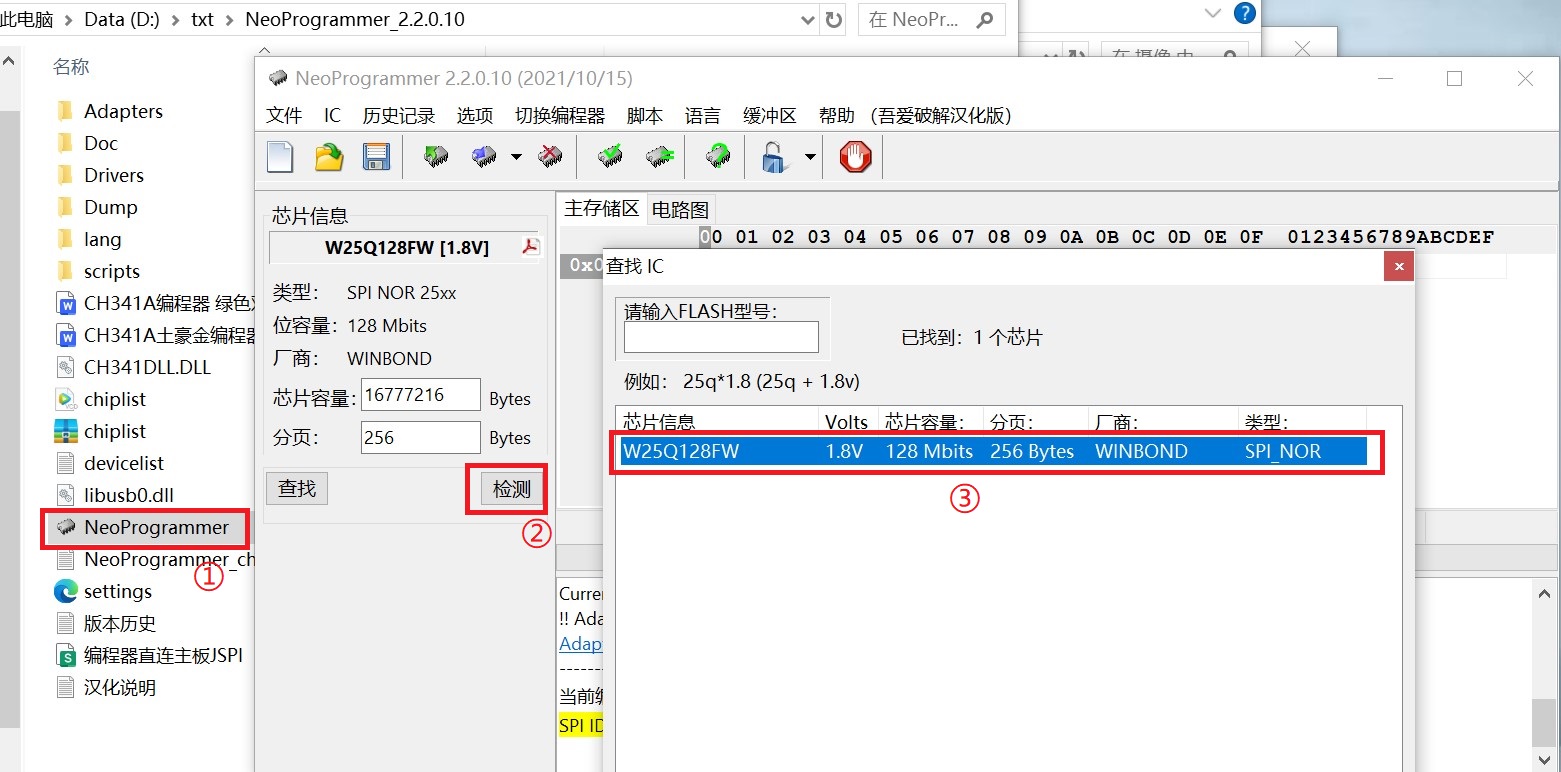
之后打开 NeoProgrammer 软件的可执行程序,选择“检测”,然后可以识别到我们的 FLASH 芯片,选中即可。如果这个时候出现识别失败有多种可能的原因:
CH341A 驱动没有安装成功
烧写部件之间没有紧密连接,接触不良等
基座的铜片和 FLASH 芯片引脚接触不良等
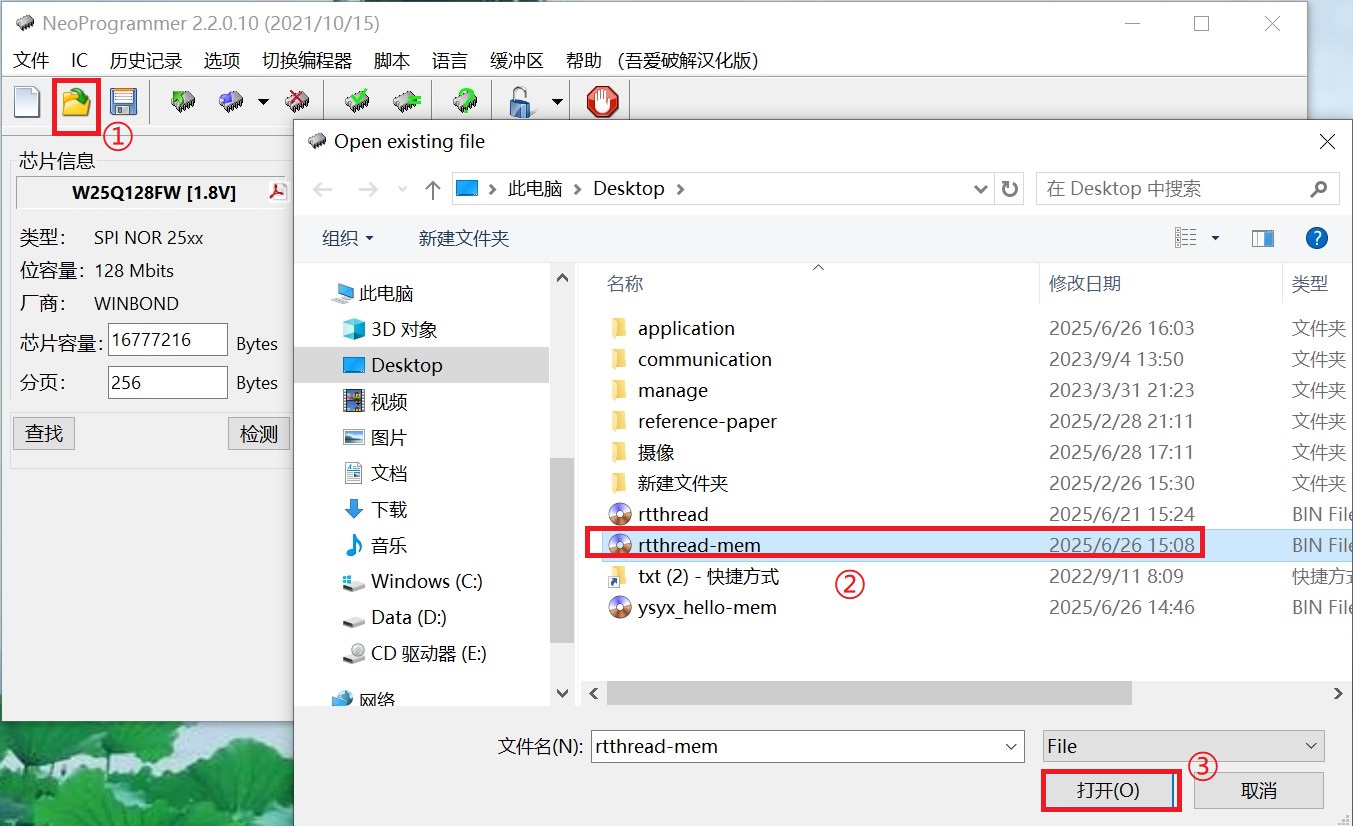
选择“打开”,然后选中我们需要写入的镜像文件(上一章节编译得到的 binary)打开即可写入 NeoProgrammer 缓冲区
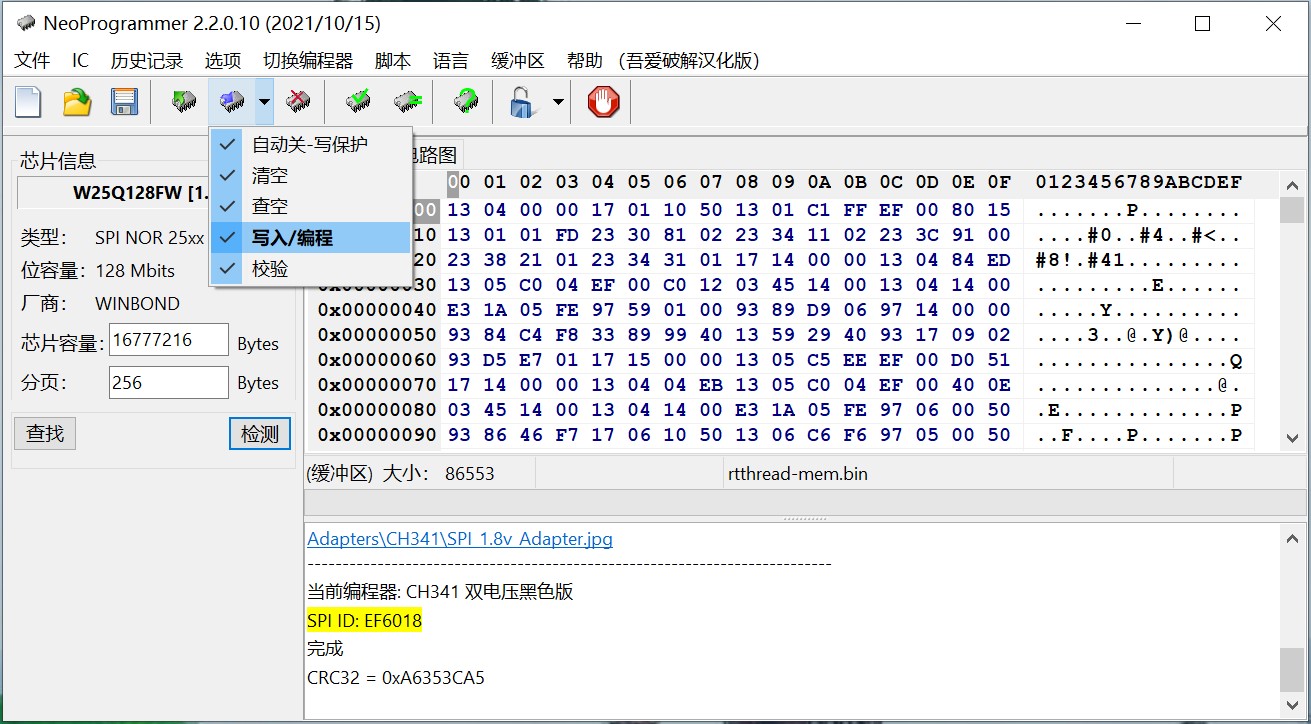
点击“写入”的配置部分进行功能配置。最稳妥的情况下选择所有的选项,这样烧写的时候会先后作查空-清空-写入-校验,检查写入是否正确,但是前后需要 6 min,非常慢;也可以只勾选“写入/编程”,直接写入就很快。
1.6.5.3. 平台的使用¶
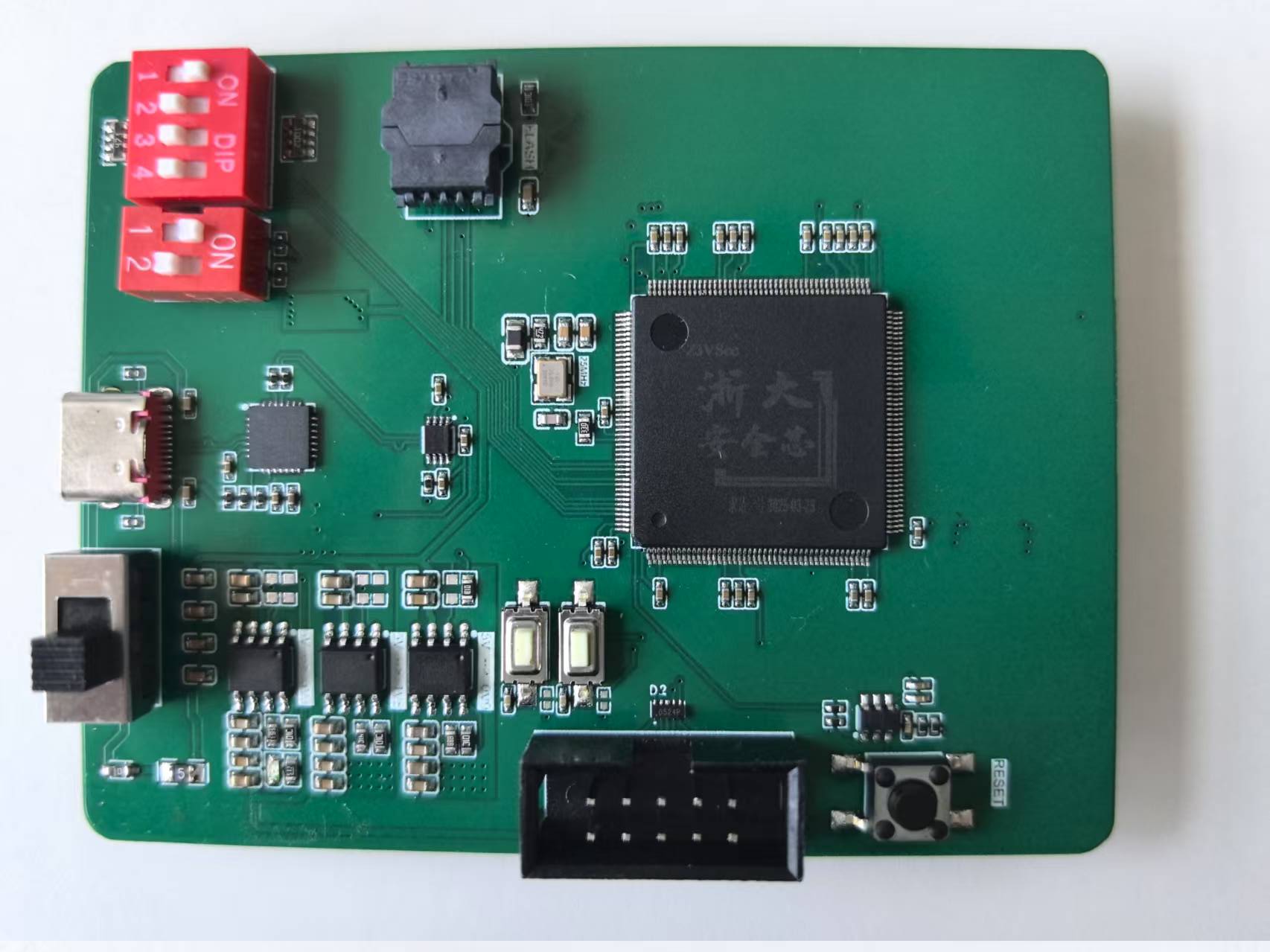
现在我们正式将烧写完毕的 flash 在平台上进行执行。我们对平台进行介绍:
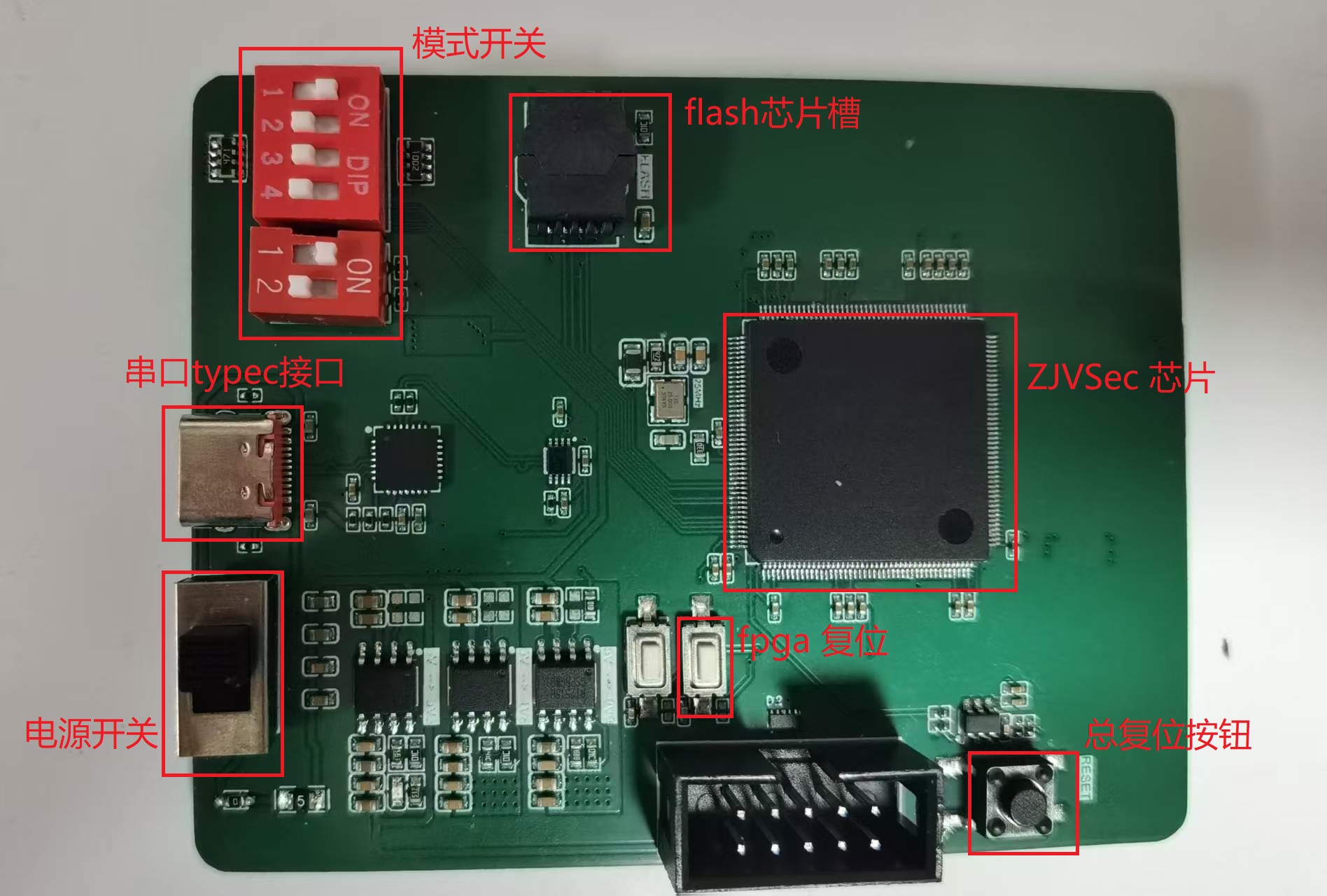
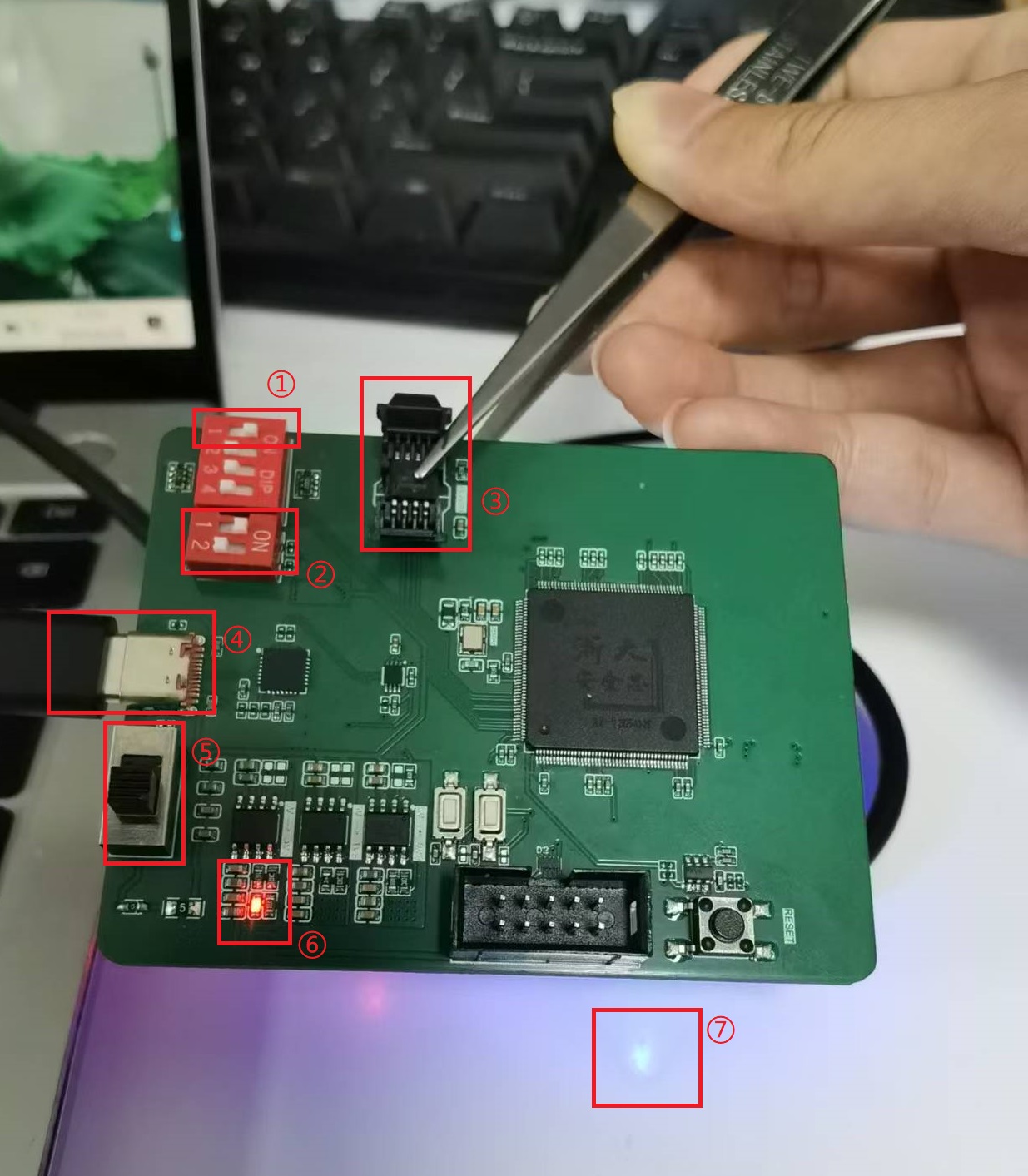
平台正面各个部件的功能如下:
电源开关:整个平台的电源总开关,打开才能工作
总复位按钮:对整个平台进行异步复位,包括处理器、FPGA 芯片等
fpga 复位按钮:只对 fpga 芯片部分进行复位
串口 typec 接口:用于 typec 数据线连接充当串口
ZJVSec 芯片:充当平台中央处理器
flash 芯片槽:用于放置 flash 芯片,盖上盖子之后才可以使用 flash
模式开关:用于设置平台的工作模式,反正有点复杂
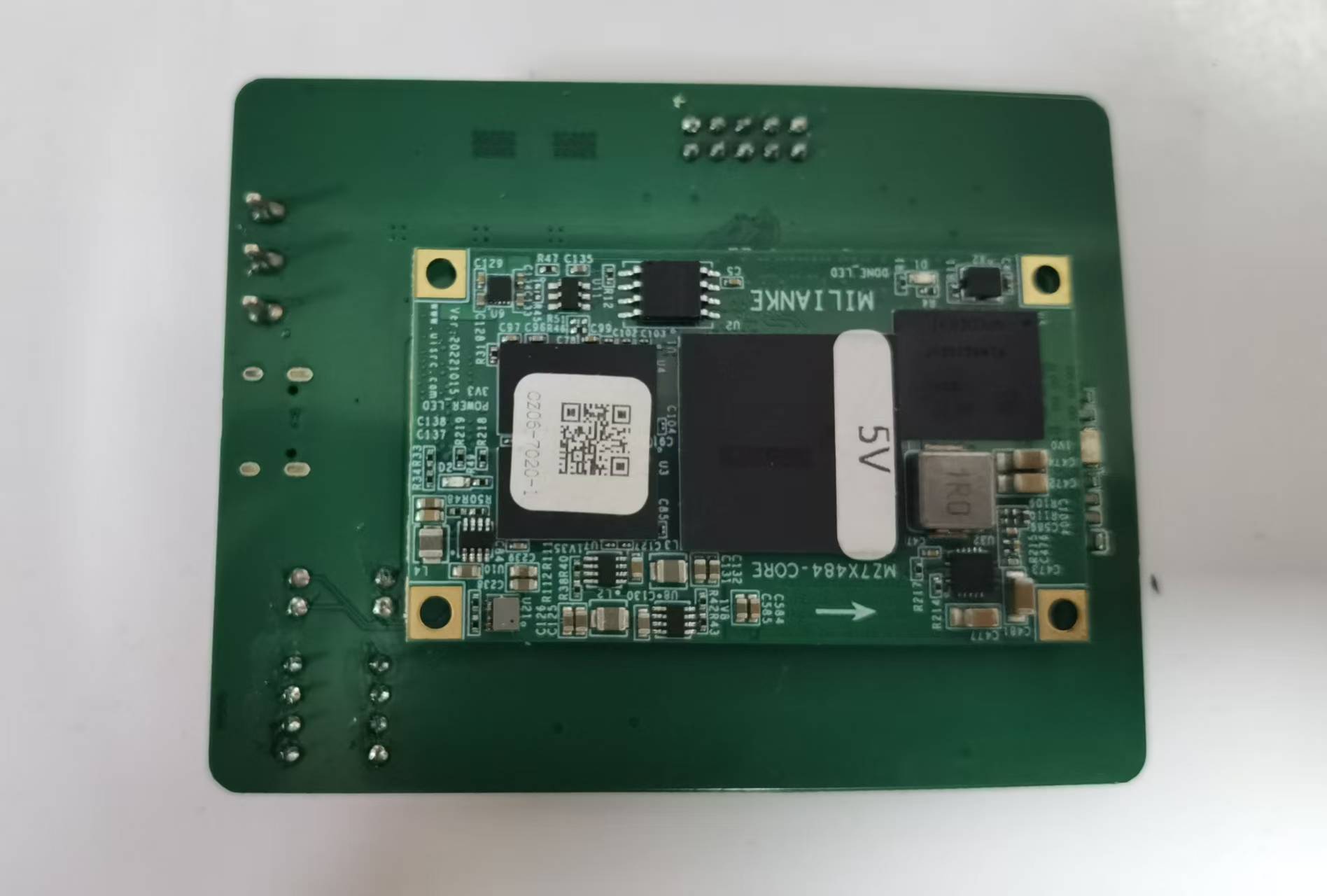
平台背面各个部件的功能如下:
DDR 芯片:充当平台内存条,大小 64 MB
FPGA 芯片:充当 MIG DDR 接口,和正面平台总线相连
之后我们连接和启用平台:
将模式开关的 4 个按钮设置为 1000
将模式按钮的 2 个按钮设置为 10
用镊子将 FLASH 芯片放入 FLASH 槽,1 号引脚对应图片的右上脚。如果方向反了,上电后 flash 指示灯不会亮起
用 USB-typec 数据线连接 pc 和平台
打开电源开关
红灯亮起,平台工作正常
背面蓝灯亮起,flash 工作正常
最后我们用串口助手(这里使用 mobaxterm)查看串口输出情况,下面分别是 hello 和 rtthread 的输出:
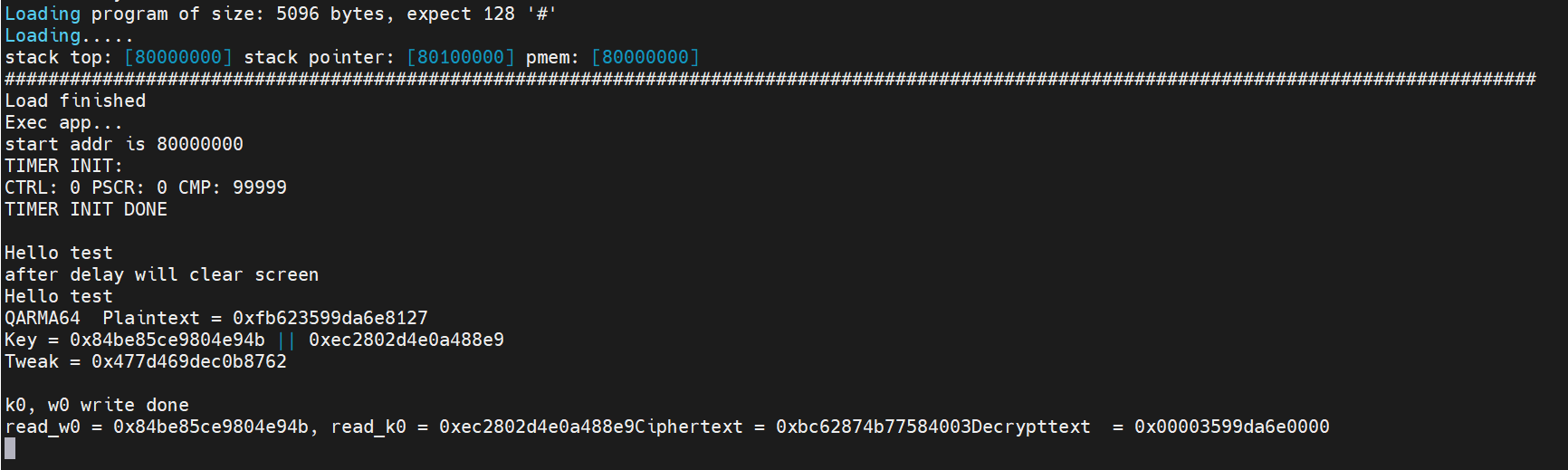
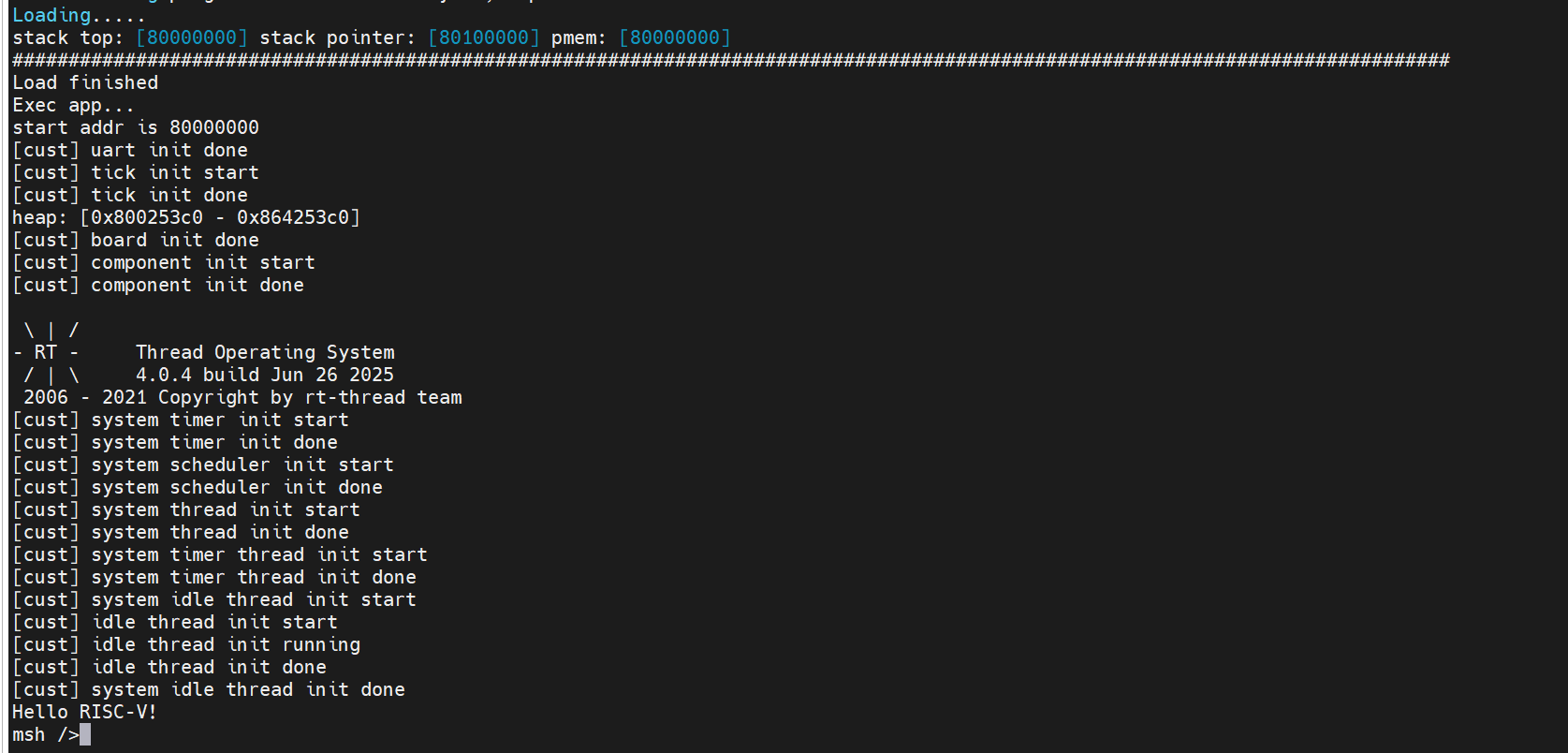
输出的时候可能存在输出错位的问题,这是因为平台编程的时候软件用的是 \n 而不是 \n\r。因此可以右键 mobaxterm 的串口界面,设置 terminal 自动插入
\r。